Page History: Edge Detector
Compare Page Revisions
Page Revision: 2011/03/18 16:05
Edge
- Points where a large change in image brightness over a short spatial distance occurred
- is defined by a discontinuity in gray-level values
Roberts Operator
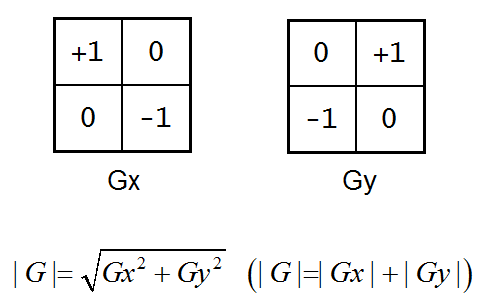
- It is the simplest of the edge detection operators and will work best with binary images.
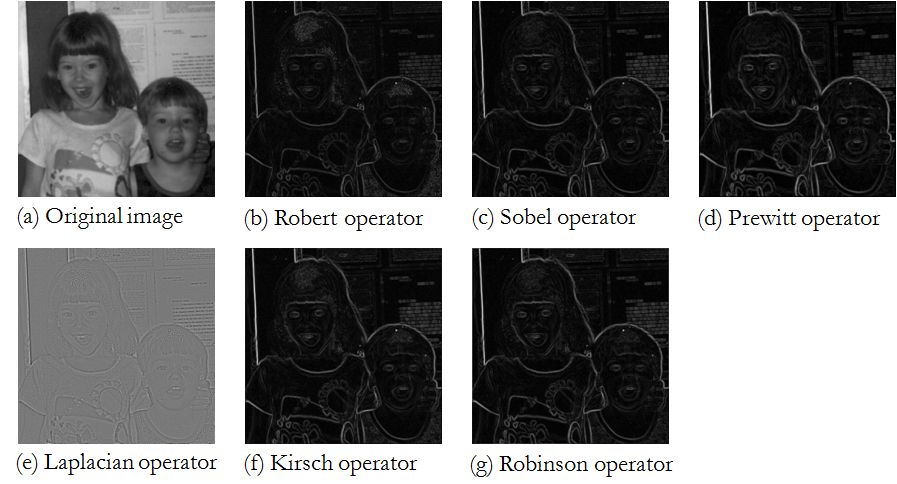
Edge Detector
Edge Detector - Noise
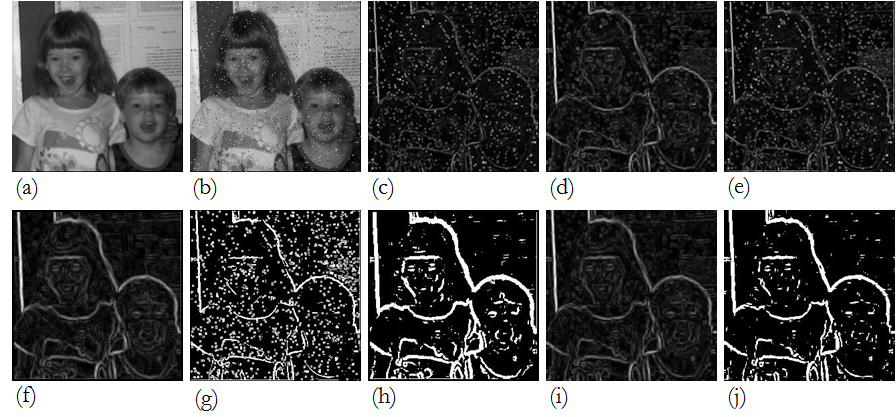
(a) Original image. (b) Image with added noise. (c) Sobel with a 3x3 mask. (d) Sobel with a 7x7 mask. (e) Prewitt with a 3x3 mask. (f) Prewitt with a 7x7 mask. (g) Result from applying a threshold to the 3x3 Prewitt. (h) Result from applying a threshold to the 7x7 Prewitt. (i) Truncated pyramid with a 7x7 mask. (j) Results from applying a threshold to the 7x7 truncated pyramid.